Hi! I'm Vinay.
Maker | Robotics Enthusiast | Student

Learn More
Maker | Robotics Enthusiast | Student
I'm a rising junior studying Computer Science and Finance
through the dual degree Jerome Fisher Program in Management and Technology at the University of Pennsylvania.
I aspire to make the world a better place by innovating new ideas and rethinking current ones.
I am extremely excited about the future of robotics, machine learning, and biomechanics.
Currently, I research approaches to drone detection in simulation at the GRASP robotics lab
and use ML to optimize aerodynamics as part of the Penn Electric Racing team.
I enjoy participating in MLH hackathons with friends and have worked on various projects that
involved programming languages such as JAVA, Python, and Ruby on Rails.
Feel free reach out to me at
vinayksk@seas.upenn.edu
regarding any cool ideas, opportunities, or questions!
Coming soon!

This was my first experience at a large company and a dedicated manager. My project was to use the Yocto flow to create linux distros that enables more developers to program FPGAs with a Python based platform called PYNQ. I modified Jupyter notebooks that implemented BNNs (Binary Neural Networks) to minimize dependencies and became fluent with Git rebases and remotes. Finally, I converted my work into packages that can be installed from a DNF server onto a device.

After winning a 2nd place at CruzHacks, the sponsoring company, Project YX, asked our team to work with them over the summer. I worked on a new machine learning project that would automatically categorize and upload an article of clothing to a digital wardrobe after a stylist takes a picture of it. The tool was built on Ruby on Rails, and implemented Clarifai's object detection software. The workflow receives raw images of clothing and tags their type (shirt, pant, and 35 more categories) using Clarifai.
During this 8-week internship, my project was to prove the practicality of an alternative architecture known as distributed computing that divides the workload across many smaller computers instead of investing resources to build a powerful supercomputer. My task was to create an SVM classification algorithm from scratch (i.e. no external Python libraries) that implements distributed computing to prove its applicability in the real world.
During this research internship at the J.J Pickle Research Center in partnership with UT Austin, I worked with the MAGIC (Mid-American Geospatial Information Center), to create a web app to help emergency responders. Specifically, I developed a real-time world earthquake map to provide information such as location and dangers about events. Aside from my main project, I learned how NASA responds to natural disasters and the importance of remote sensing.
In this summer program, I planned, designed, and built a robotic hand controlled by myoelectric signals in the forearm. The goal was to create a low cost, reproducible, and advanced hand prosthetic to attempt to solve the problem of expensive prosthetics. I worked with Autodesk Inventor, 3D printers, and the Arduino programming language. I continued this project and presented at the Pre-Collegiate Stanford Science Conference and the Synopsys Science Fair.
Kuvera is a portfolio advising and visualization platform for retail investors. Kuvera addresses investment issues faced by prospective investors (i.e what to trade and when to trade). Based on their financial plan, weekly capital contribution, current holdings, and interests, Kuvera will generate analytics and personalized stock recommendations with respect to their risk aversion.
Python Flask Firestore Google Cloud Functions XGBoost Heroku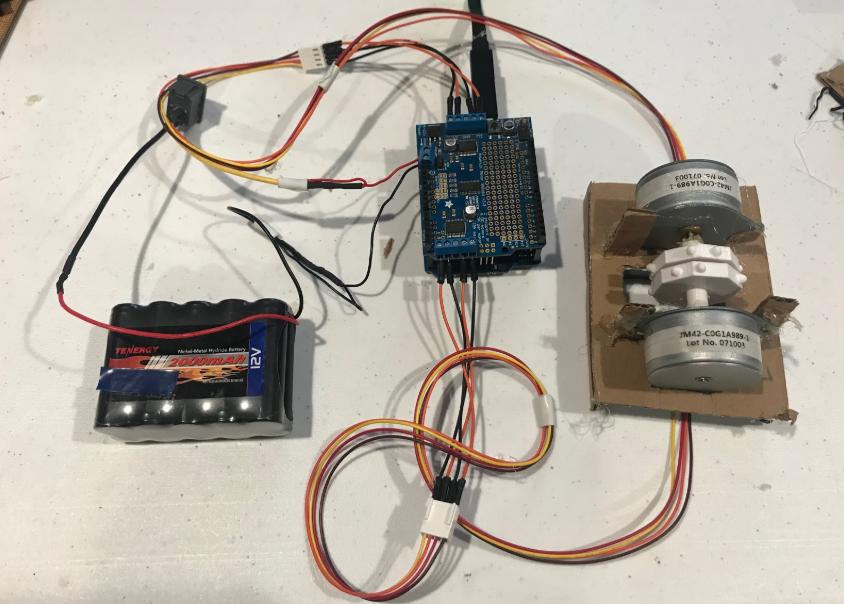
Iris is a device that helps blind people learn Braille. The device is made of cardboard and 2 3D printed octagons and spikes that can rotate to form any character in the Braille language. An accompanying app, which has been designed with a minimilistic UI for the visually impaired, serves as the controller and provides a test and learn mode.
Arduino MKR1000 iOS App Firebase 3D Printing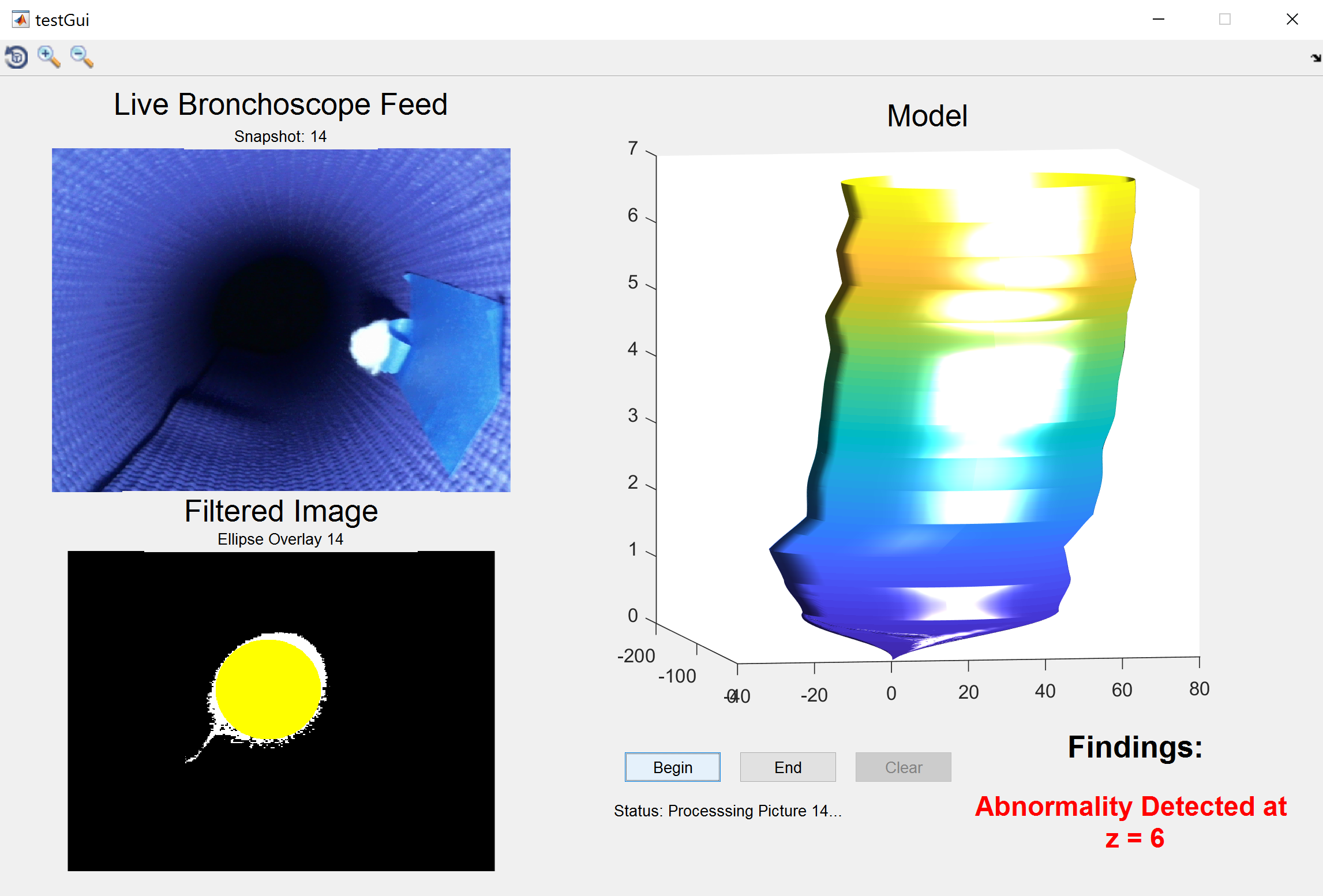
This algorithm analyzes the video feed from the tip of the bronchoscopy tool to generate and reconstruct a 3D model of the lungs as the doctor moves the bronchoscope deeper into the lungs. By using MATLAB's image processing and math toolbox, I created a GUI-fied version of my algorithm as an radiation-free enhancement for doctors who perform the procedure. This project was selected to be presented at the California State Science Fair.
MATLAB OpenCV 3D Reconstruction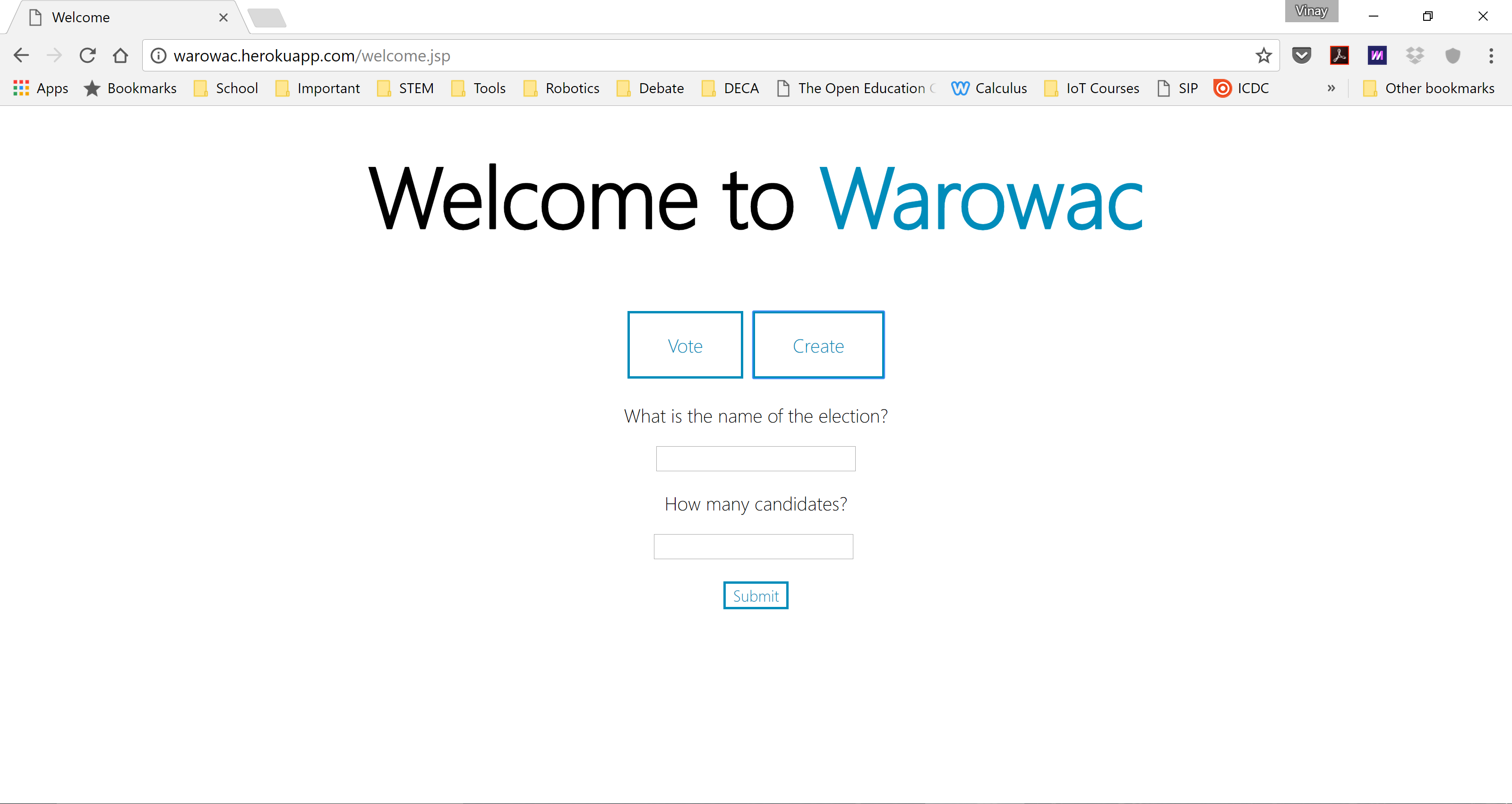
The alternative voting system solves the spoiler effect problem in a normal popular vote system by allowing voters to rank the candidates. This website allows users to create elections and voters to cast their votes in a minimalistic environment.
HTML/CSS + JS JAVA Postgres DB Heroku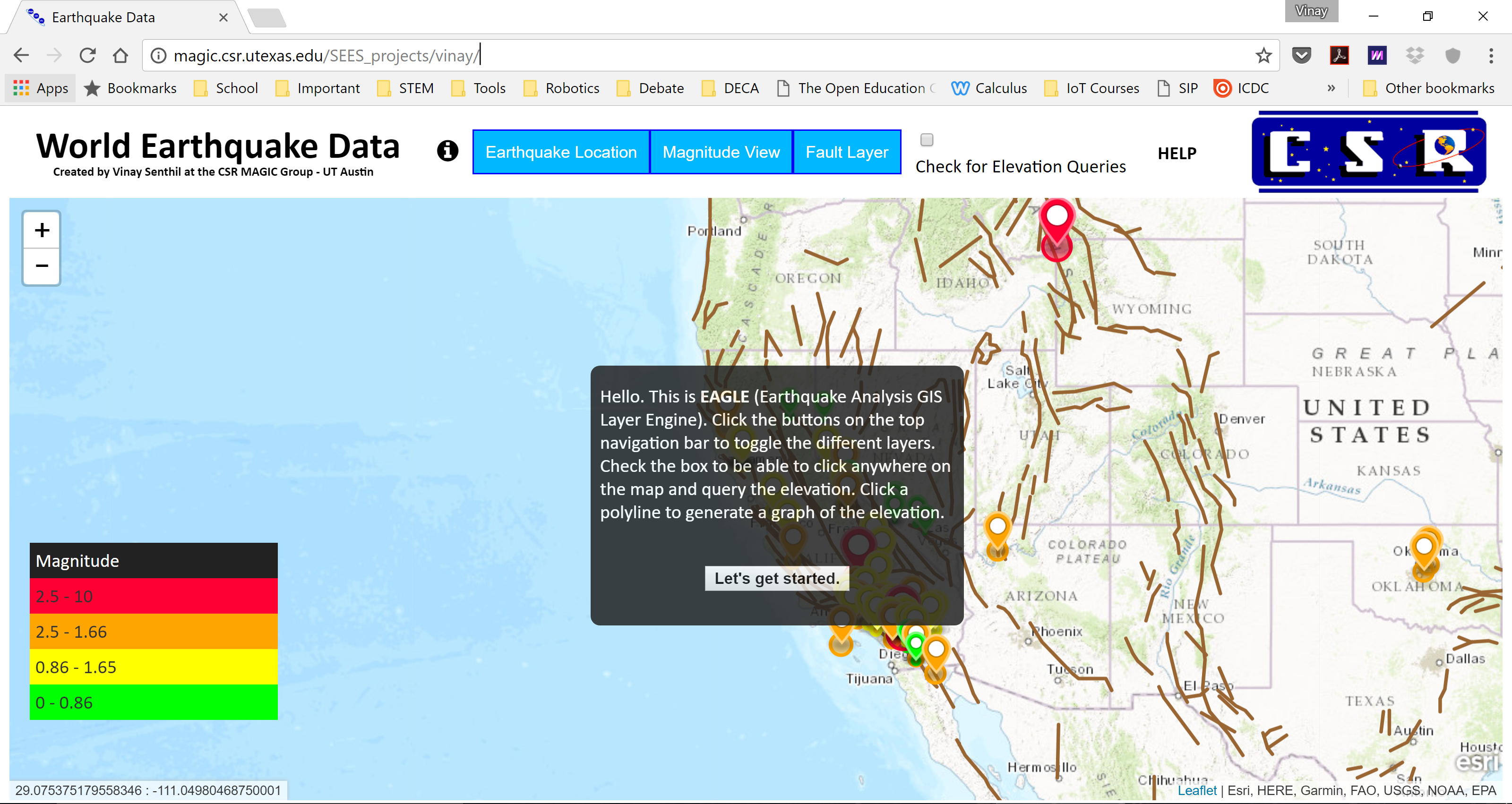
EAGLE (Earthquake Analysis GIS Layer Engine) queries live earthquake data from USGS from the past 24 hours and displays them on a map, color coded to their magnitude. By clicking on the circles the user can access information such as time, location, and elevation.
HTML/CSS + JS REST APIs Heroku
For my design, I combined the latest technologies of 3D printing and myoelectric sensors to create a non-invasive bionic hand that is controlled by the impulses in the forearm. I used spools and placed the DC motors into the palms of the hand to mimic the muscles in the hand.
Arduino Uno 3D Printing Autodesk Inventor| Date | Description |
|---|---|
| 1/2018 | Top 300 Scholar for the Regeneron Science Talent Search |
| 3/2017 | 1st Place in Bioengineering and Computational Biology Category and Qualified to California State Science Fair |
| 3/2017 | 1st Place for Best iOS App at HSHacks III |
| 11/2016 | Best Overall App at GunnHacks |
| 5/2016 | Top 20 International Finalist, DECA ICDC |
| 3/2016 | 1st Place, Entrepreneurship Independent Business, 2016 DECA SCDC |
| 3/2015 | 4th Place, Entrepreneurship Startup Business, 2016 DECA SCDC |
| 2/2015 | Inspire Award, FTC Robotics |
Built by Vinay S. | 2020